
An overview of
ETHERCAT
EtherCAT is a highly flexible Ethernet network protocol that is developing at a rapid rate and growing at an even faster clip. A unique principle called “processing on the fly” gives EtherCAT a handful of unique advantages. Because EtherCAT messages are passed before being processed in each node, EtherCAT operates at a high speed and efficiency. The process also creates flexibility in topology and incredible synchronization. Outside of the advantages gained from “processing on the fly,” EtherCAT benefits from superb infrastructure. EtherCAT includes, among other things, a safety protocol and multiple device profiles. EtherCAT also benefits from a strong users group. The combination of benefits means EtherCAT is poised for continued growth.
History of EtherCAT
Ethernet application layers used in industrial and building automation systems are typically “low payload”, half-duplex application layers. An Ethernet message for an application layer like Modbus TCP, for example, may carry only a single register for a server device with little data like a valve controller. In small payload devices like that, huge slices of bandwidth are lost as not only small data packets are moved but those messages are only issued when the Client or Master device requests that data. Modbus TCP is an extremely inefficient example but the same kinds of bandwidth and payload issues can be found in application layers like EtherNet/IP and Profinet IO.
Beckhoff, a German automation company, developed a fieldbus system called Fast Lightbus to correct the low bandwidth utilization problem present in other Ethernet protocols. This protocol led to EtherCAT which Beckhoff released in 2003.
EtherCAT Technology Group>
![]()
In 2004, Beckhoff helped to create a new group to promote the EtherCAT protocol. Their efforts led to the EtherCAT Technology Group, or ETG. Beckhoff donated the rights to EtherCAT to the ETG.
The advantages of the EtherCat Technology Group alliance are numerous. The ETG is able to provide research and advancement of the EtherCAT protocol. The ETG also publishes specifications and papers that allow member organizations greater success in using EtherCAT.
The ETG is headquartered in Nuremberg, Germany, but also has offices in Japan, China, Korea, and Austin, TX.
International Standards
The ETG works with the International Electrotechnical Commission (IEC), specifically serving as a liaison for the digital communications working group. The partnership has led to standardization throughout the EtherCAT protocol’s history.
In 2005, EtherCAT was standardized as IEC/PAS 62407. This standard is now obsolete, though not due to any fault in EtherCAT. Instead, EtherCAT has been integrated into a number of other standards, a sign of its versatility.
The IEC fieldbus standards IEC 61158 and IEC 61784-2 both include EtherCAT as of 2007. EtherCAT is also included in the ISO 15745-4 published standard.
Fundamental Principle
The fundamental principle of EtherCAT is pass-through reading. Pass through reading means that messages are not destined for a single node and consumed by that node. Instead, messages are transmitted to the following node in a string as they are processed. Input data to a node is read as the message is processed and output data is inserted in the message to the next node.
A single message is issued by the EtherCAT Master with data for all nodes. As the message is transmitted around the ring and back toward the Master, each node reads its inputs and adds its outputs to the message. When the message arrives back at the EtherCAT Master every node in the network has received new input data from the Master and returned new output data to the Master. Without the deficiency of small payloads or messages targeted to specific nodes, an EtherCAT network can achieve maximum bandwidth utilization.
An EtherCAT network can be compared to a railway where each station can off-load and re-load train cars while the train moves through the station.
Self Terminating Technology
EtherCAT uses the standard IEEE 802.3 physical layer. No special hardware is required to implement an EtherCAT network.
External switches are not used in an EtherCAT network. Instead, each EtherCAT device embeds a switch. Each device has two RJ45 ports. One RJ45 is connected to the previous node in the network and one is connected to the next node.
Somewhat unique to Ethernet is the EtherCAT concept of self-terminating networks. Any node that does not detect a next node in the string automatically terminates the network at that point. Terminating nodes copy messages from the Master’s transmit path to the Masters receive path.
EtherCAT networks can be wired in a ring if the Master has two Ethernet ports. Networks wired in a ring provide a measure of redundancy. Cable breaks anywhere in the ring are closed by the ports upstream and downstream of the break. The Master can detect the break and send messages out to both of the new sub-segments.
Because of this self-terminating feature, EtherCAT networks can be wired using several different topologies including star, line, or tree.
Data Representation
How a network represents data is a fundamental characteristic of a network. It is a distinguishing factor that should be the first question on the mind of anyone seriously investigating a network technology.
The Ethernet application layer with the most sophisticated data representation is CIP. CIP (Common Industrial Protocol) devices from the ODVA use an Object/Instance/Attribute data representation. Like data is collected in objects. Common sets of those objects are specified as instances. Data items within those objects are attributes. Objects can also have event handlers and operational structures implemented as state machines.
The Ethernet application layer with the least sophisticated data representation is Modbus TCP. Like it’s serial cousin, all Modbus TCP devices represent data as either 16-bit unsigned registers or coils. There are input and output versions of each. Unfortunately, there is little standardization or commonality in Modbus devices. Each manufacturer develops their own unique Modbus Register map.
Profinet IO uses a similar data representation to Profibus. Each device looks like an I/O rack. There is a rack designator, a slot, a channel and a point.
EtherCAT uses a very simple data representation, sort of like Modbus. There is a data space, a huge data space, and each device is allocated a part of that data space. As messages are transmitted through the network, they map their portion of the data space to the data in the Ethernet message.
EtherCAT Frame
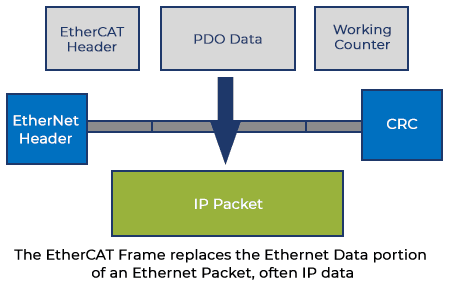
For the EtherCAT frame to keep rolling without stopping at each node, the packet must contain specific components, much like a train’s cars.. Looking at the EtherCAT frame, its analogy to a train is quite apparent. The header acts like a locomotive. The cars, plus their content, are PDO Data. The caboose, complete with shipping information, is the working counter.
All of these parts fit simply into the EtherCAT frame, and the frame fits simply into an Ethernet frame. The Ethernet is the transmission media that allows EtherCAT to operate. The EtherCAT frame simply replaces the IP frame of a standard Ethernet message. Thus, the Ethernet frame does not need modification, again contributing to flexibility for EtherCAT.
EtherCAT Header
The EtherCAT frame starts with a standard header. The first integer is a length identifier. This bit tells the nodes how long the EtherCAT portion of the frame will be. Length is especially important in an EtherCAT frame; the length varies with the number of message bytes and nodes just like more train cars of product makes the train longer.
The second portion of the EtherCAT header is a reserved bit, which is followed by a type integer. The type integer defines the type of message, ensuring correct interpretation.
PDO Data
After the header, the Ether CAT frame contains Process Data Objects, or PDOs. The PDOs correspond to the number of nodes and messages within the frame. Each PDO contains data for a node, the product inside the boxcar. The PDOs are also individually addressed, telling the nodes which PDOs to take.
Working Counter
The final portion of an EtherCAT frame is the working counter. This number works much the same way a frame check sequence works. The working counter is dependant on the content of the EtherCAT frame. By ensuring the working counter is correct, each node can ensure it receives the entirety of the frame.
Advantage: Speed
![]()
The fundamental principle of “processing on the fly” behind EtherCAT provides a clear advantage. The delay a message would experience over a standard Ethernet network is much larger than the small delay in an EtherCAT network. There are two important things to note, however. First, there is a delay. The EtherCAT frame cannot move continuously, so each node introduces a small delay.
Second, EtherCAT networks can be slowed if necessary. Some computers may have difficulty handling the increased quantity of cycles and decreased cycle times optimized EtherCAT can offer. The network can be configured for the computer, however, to allow the greatest speed these computers can operate under.
As is always said about numbers; “figures don’t lie but liars figure”. Giving any performance numbers for an industrial network is open to suspicion but generally 1000s digital IOs can be updated in 30 microseconds and 100 Servos can be updated at 10Khz.
Flexible Topology
The “processing on the fly” principle of EtherCAT has another advantage in addition to speed. EtherCAT networks can be configured in many types of topology. Just like Ethernet, a star topology is quite simple. EtherCAT can extend well beyond a star topology, though.
EtherCAT creates the possibility of a fieldbus system using Ethernet hardware. Combing the fieldbus, or trunk, topology with the start topology creates an incredibly useful new style. The combination of trunk lines and individual branches give flexibility in programming for an EtherCAT network.
EtherCAT has built-in redundancy that compensates for potential breaks in wiring. When a line is broken, the network can detect a break. The EtherCAT frame can travel to the end of the network and, because messages travel back over the same path in reverse, the frame reverses and travels back to the master. In this way, all EtherCAT networks can act as though they’re in a ring topology. Configuring an EtherCAT network in a ring topology, then, adds another level of redundancy.
It might be assumed from this discussion that EtherCAT is limited to a single subnet. That is not true. EtherCAT telegrams can be transported in routable UDP packets. Of course, routing will introduce more delays than having all EtherCAT slaves on a single subnet.
Synchronization
![]()
As made clear through the publishing of the IEEE 1588 Precision Time Protocol standard, synchronization has gained importance in the Industrial Networking industry. Synchronization is another advantage of EtherCAT systems. EtherCAT includes a distributed clock mechanism, giving it a low jitter that meets the specifications of IEEE 1588 without additional hardware.
The mechanism is possible because of the timestamps each node includes in the EtherCAT frame. Each node attaches a time stamp to the EtherCAT frame twice. First, the slave node adds a timestamp when receiving the message as it is sent through the network. Then, when the frame returns back through the nodes, each slave adds another time stamp. The master receives the frame with two time stamps per slave.
With the time information, the master can calculate the delay for each node. The master repeats the calculation for every frame it sends. As the network operates, the enormous sample size means the master has incredibly accurate data. The inherent ring topology creates an incredibly efficient clock mechanism that increased in accuracy with every message.
Other Features
Synchronization, flexible topology, and speed are advantages EtherCAT has due to its unique operating principle. Through the work of the ETG, though, EtherCAT has some other distinct features worth mentioning.
Device Profiles
EtherCAT uses device profiles much like Ethernet/IP and other CIP protocols use objects. Many fieldbus devices used in EtherCAT networks are already defined in CAN. EtherCAT supports the entire CANopen family, another IEC standard EtherCAT fits within. In addition to CANopen, EtherCAT supports the Sercos drive profile. The drive profiles allow a user to configure the EtherCAT network to their specific needs without “reinventing the wheel.” Basic profiles are predefined.
Safety Protocol
One more IEC standard among the many that describe portions of EtherCAT is IEC 61508. This standard describes Functional Safety over EtherCAT (FSoE). The FSoE version of the EtherCAT protocol meets the requirements of Safety Integrity Level 3. To achieve higher safety, FSoE adds in safety information to the standard EtherCAT frame.
Development
EtherCAT Master devices can be developed using any standard Ethernet MAC. No special hardware is needed. Beckoff provides a PC Master device that can access EtherCAT slave devices from a standard Windows PC. EtherCAT Slave devices must use the EtherCAT ASIC (Application Specific Integrated Circuit) to access the EtherCAT network. The EtherCAT ASIC is available from Beckoff and other suppliers.
Implementation Costs
Hardware costs for the controller or Master device are limited as no special hardware is required and any Ethernet enabled PC can be used as a Master device. EtherCAT Slave devices require a fairly large investment in design and development as the EtherCAT ASIC is a large footprint device that is more expensive than standard Ethernet enabled microprocessors. On system implementation, EtherCAT can be very cost effective. No additional switches, routers or hubs are required to form the EtherCAT network and it can be deployed in the topology that is most suitable for the application.
Summary
EtherCAT is a very high performance, easy to deploy, open application layer protocol for Ethernet applications. Its synchronization capabilities and full bandwidth utilization are very attractive for motion applications where synchronizing large numbers of drives is required. It saves installation expense by eliminating both Ethernet start topology and all switches routers and hubs. EtherCAT fits will in the spectrum of Ethernet application layers where performance, topology and overall deployment cost are driving factors.